

Автомобильный Ethernet: комплексный подход к следующему поколению сетевого стандарта для автотранспорта
Введение
Требования к информационным системам современного автомобиля и к их пропускной способности растут вслед за появлением новых сложных приложений — например, систем обеспечения безопасности или систем обработки мультимедийной информации. Существующие сети управления транспортным средством, такие как LIN, CAN и FlexRay, не могут покрыть растущие требования по пропускной способности и расширяемости, которые нужны для различных систем помощи водителю. Новые сетевые технологии должны перенять как можно больше от бытовых и других неавтомобильных областей, но с учетом требований конкретных автоприложений. Это включает в себя как аппаратные компоненты, так и наборы программ. Коммуникационные решения с более высокой пропускной способностью, такие как транзисторы с МОП-структурой, существуют, но слишком дороги для широкого использования в автомобильных сетевых системах. Сегодня автомобильная сетевая архитектура выглядит как гетерогенная система, что обусловлено ее историческим развитием и разрастанием (рис. 1).
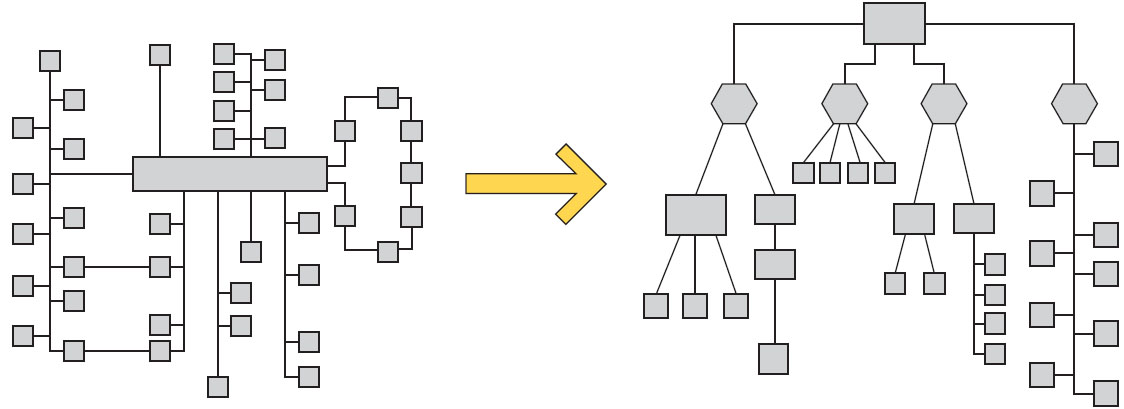
Рис. 1. Доменная архитектура — сейчас (слева) и в будущем (справа)
Новая автомобильная сетевая система, построенная с нуля, скорее всего, будет иметь такую архитектуру, как показано справа на рис. 1. Здесь электронный блок управления (ЭБУ) структурирован в виде иерархической архитектуры, где области приложений связаны через магистральные шины. У Ethernet есть все предпосылки для такого комплексного подхода. Он может быть использован в основной магистрали для подключения различных областей, а также для подсетей, которые просто требуют большей пропускной способности.
Коммутируемая сеть Ethernet основана на связи «точка–точка», где пропускная способность более эффективно использована по сравнению с транслирующими системами, такими как CAN или FlexRay. Принцип коммутации может быть с успехом применен для преодоления границ доменов без затрат времени на упаковку и повторную сортировку передаваемых сообщений или пакетов, как это требуется в смешанном межсетевом интерфейсе.
Использование Ethernet в транспортном средстве означает смену парадигмы в разработке следующего поколения автомобильных компьютерных сетей: подключение различных сетевых доменов, транспортировки различных видов данных (управляющие сигналы, потоковая передача данных и др.) и выполнение строгих требований надежности в тяжелых условиях расширенного температурного диапазона и электромагнитной совместимости.
Эволюция до автомобильного Ethernet
Ethernet является открытым стандартом и определяет два нижних уровня эталонной модели взаимодействия открытых систем. За последние десятилетия комитет по стандартизации IEEE 802 установил несколько физических уровней от 10 Мбит до 10 Гбит. IEEE 802.3u (100Base-TX) широко используется в бытовых и промышленных областях, а недавно был применен для диагностики автомобилей через IP, как описано в ISO 13400.
Группа специалистов по внедрению AVB-технологий (Audio/Video Bridging) из AVnu Альянса [1] определила IEEE-стандарты, включающие службы высокого уровня для IEEE 802-совместимых сетей (рис. 2). Протоколы IEEE 802.1 AS, QAT, QAV и BA определяют расчет времени и синхронизации, распределение поточной передачи, перенаправление и организацию очередей в системах аудио/видео захвата. Кроме того, протокол транспортного уровня по стандарту IEEE 1722 облегчает поток чувствительного ко времени аудио и/или видео через AVB Ethernet-сети и совместимость между конечными станциями.
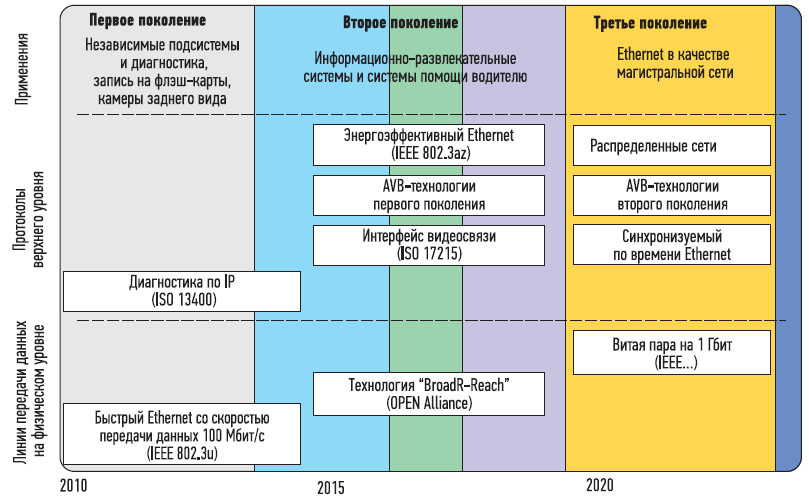
Рис. 2. Схема Ethernet: поколения и уровни
В системах помощи водителю для таких функций, как круговой обзор, все чаще используются видеокамеры. Деятельность по стандартизации на уровне протоколов связи и на физическом уровне недавно привела к появлению ISO 17215, который называется «Интерфейс передачи видео для камер». В целях дальнейшего развития автомобильной технологии Ethernet Broadcom сформировала организацию One Pair EtherNet (OPEN) Alliance Special Interest Group. OPEN Alliance будет работать над стандартизацией компонентов и проводить тесты, основанные на технологии Broadcom BroadR-Reach [2]. Другой целью группы является сбор требований для будущих технологий, таких как Reduced Pair Gigabit. Наконец, AUTOSAR (Automotive Open System Architecture) является открытой и стандартизированной архитектурой программного обеспечения для автомобильного Ethernet.
Ethernet не был разработан для сетей TDMA (множественный доступ со временным разделением или уплотнением, МДВУ), и все еще необходимо найти подходящее решение для достижения требуемой производительности в реальном времени и качества обслуживания. AVB уже включает в себя меры по обеспечению своевременной доставки медиа-потоков.
Для рабочей группы Automotive AVB Gen2 улучшение времени ожидания является одной из основных целей. Первое приложение синхронизированного по времени Ethernet (Time-Triggered Ethernet, TTE) было применено в авиационной технике [3] с высочайшими требованиями безопасности. Определенный в SAE AS6802 и отличный от аудио/видео технологий TTE основан на распределенном алгоритме тактовой синхронизации, который в конце концов приводит к получению точного, с детерминированным режимом, графика работы.
Хотя совместная интеграция AVB и TTE возможна [4], необходимы дальнейшие исследования, чтобы обеспечить их использование в автомобильных приложениях, где мультимедийные потоки, данные контроля в режиме реального времени, а также диагностическая информация и обновления программного обеспечения должны передаваться в одной и той же сети.
Поколение 1.
Диагностика по IP
Первые приложения Ethernet в автомобилестроении — это встроенная диагностика и обновление flash-памяти ЭБУ. Для чтения диагностических данных и обновления программного обеспечения в течение отведенного времени производительность существующих систем, таких как CAN и FlexRay, была недостаточна. Ethernet 100 Base-TX категории 5 был выбран в качестве средства связи между автомобилем и диагностическим оборудованием. Высокая пропускная способность Ethernet экономит затраты на обслуживание и производство. ISO 13400 и ISO 14229 изменили существующие и определили новые, стабильные современные диагностические стандарты. Универсальные продукты и компоненты давно доступны, а такие требования, как прочность и температурные допуски, были смягчены для данного конкретного применения Ethernet в автомобиле.
Поколение 2.
Системы помощи водителю и развлечения
Второе поколение автомобильного Ethernet будет заниматься информационно-развлекательными системами и видеонаблюдением для кругового обзора. Современные решения камер заднего вида часто используют LVDS (Low-Voltage Differential Signaling, низковольтная дифференциальная передача сигналов) для передачи видео, что хорошо работает в случае использования одной камеры. В недалеком будущем ожидается применение нескольких камер, а также получение данных с радиолокационного датчика расстояния (рис. 3). LVDS-система становится неэффективной с точки зрения прокладки проводов и дороговизны кабелей и разъемов. Ethernet позволяет видеокамерам быть подключенными к центральному блоку управления для синхронизации и дальнейшей обработки.

Рис. 3. Пример расположения камер и радаров для системы помощи водителю
Ethernet-камеры могут дополнительно использовать «энергоэффективный Ethernet» (IEEE 802.3az), в рамках которого вводится Low-Power Idle (LPI, «режим простоя») и пробуждение по необходимости для экономии энергии, пока камеры не используются. Кроме того, решения для питания через Ethernet (PoE) являются предпочтительнее, поскольку они позволяют уменьшить количество проводов. Преимущества более высокой пропускной способности и низкого времени ожидания очевидны. Использование нескольких камер высокого разрешения для обнаружения объекта требует несжатой передачи данных, чтобы избежать образования артефактов сжатия при обнаружении препятствий, а также сильного драйвера с высокой пропускной способностью.
Последние решения, касающиеся развлекательных систем, основаны главным образом на патентованных и немасштабируемых технологиях. Ethernet в этой новой области применения является экономически эффективным за счет использования стандарта AVB. Синхронизированная передача видео- и аудиоданных с гарантированной задержкой может быть достигнута с применением существующих AVB-компонентов Ethernet 1-го поколения. В этом направлении помогут развиваться как работа по стандартизации AVnu, так и самые последние разработки коммутирования и протоколов физического уровня (PHY) на основе BroadR-Reach.
Поколение 3.
Ethernet как основа сетевой инфраструктуры
В то время как для первого и второго поколений работа Ethernet ограничивается устройством подсетей некоторых приложений, таких как информационно-развлекательные или системы помощи водителю, с третьим поколением Ethernet станет основой в автомобильной сети. Типичная магистраль показана на рис. 4. При разработке такой сети основной идеей будет двусторонняя связь между ЭБУ, которая организована через сетевое администрирование.
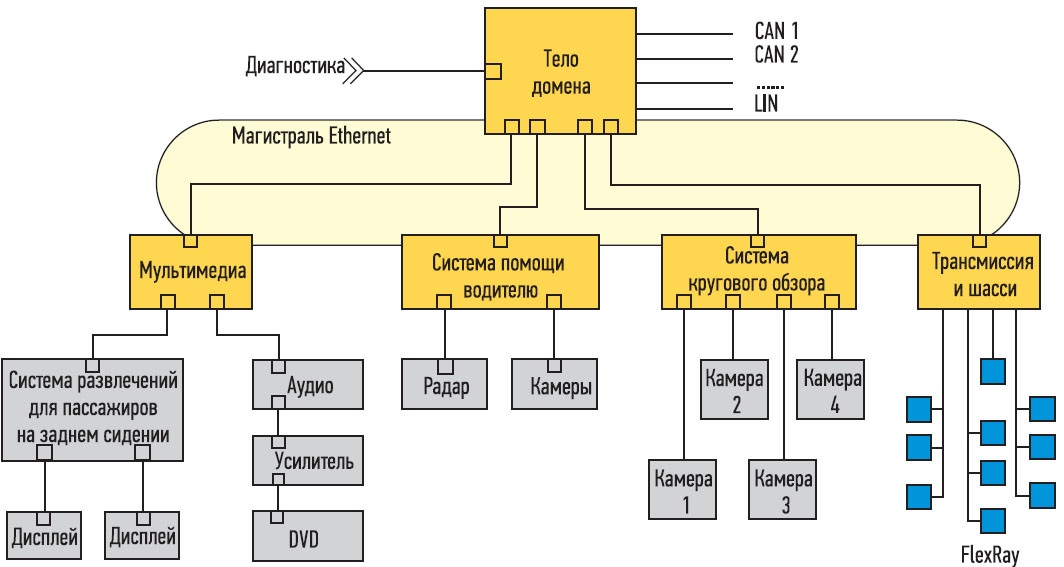
Рис. 4. Магистраль Ethernet в доменной архитектуре
Сеть связи будет иерархически организована с контроллерами домена, подключенными через магистраль Ethernet. Подсети ниже контроллеров домена могут также быть на основе Ethernet, с переключателями между уровнями. Эта структура обеспечивает масштабируемое решение, поскольку каждый порт коммутатора в общем случае может быть реализован как 10-Мбит, 100-Мбит и 1-Гбит без каких-либо изменений в высших уровнях протокола. Новизна подхода заключается в том, каким образом сообщение передается через доменные границы к месту назначения. В современных сетях и межсетевых интерфейсах реализация этой функции заключается в IP-маршрутизации с помощью коммутаторов и роутеров, что и предлагается для магистральных сетей. Преимущество заключается в полной независимости IP-маршрутизации от конкретной реализации, что позволяет создать единое решение для автомобильной сети. Кроме того, идея IP позволяет легко подключить автомобиль к Интернету [5] (эта возможность важна главным образом тем пользователям, кто хочет иметь в машине доступ к интернет-услугам в той же степени, что и в домашних условиях).
Еще одной особенностью новой архитектуры является то, что будет только одна магистральная сеть Ethernet, в которой должна осуществляться передача различных классов данных: диагностическая информация, видео/аудио-потоки и высоконадежные данные управления. В то время как AVB Ethernet и TTE уже могут обеспечивать различные уровни качества обслуживания в режиме реального времени, необходимо продолжать исследования и разработки для проверки безопасного сосуществования этих различных классов передачи данных в одной сети.
BroadR-Reach — 100-Мбит Ethernet для автомобильных решений
Хотя 100-Мбит Ethernet и IP- технология были доступны с начала 1990-х гг., прошло почти два десятилетия, прежде чем появился интерес к ним как к следующему поколению стандартных сетей со стороны автомобильной промышленности. Это произошло отчасти из-за отсутствия должного физического уровня, подходящего для использования в транспортных средствах. Рис. 5 иллюстрирует технические принципы и объясняет, почему ориентированный на потребителя физический уровень Fast и Gigabit Ethernet не применим в машине. Fast Ethernet базируется на MLT-3 сигнальной схеме (выделение трех уровней «+»/«0»/«–») и имеет однонаправленную связь по двум витым парам кабеля. Gigabit достигает десятикратного роста скорости передачи данных путем введения двунаправленного обмена на четырех витых парах кабеля и сигнальной схемы PAM-5. Чтобы компенсировать 6-дБ потери сигнал–шум в PAM-5 по сравнению с MLT-3 и избежать ошибок, используется решетчатый код (код Треллиса).

Рис. 5. Схемы кодирования стандартного Ethernet и BroadR-Reach
Высокая скорость передачи в 125 Мбод для Fast и Gigabit Ethernet вносит значительный вклад в электромагнитное излучение в критическом FM-радиодиапазоне и, следовательно, исключает использование недорогой неэкранированной витой пары в автомобильной среде. С использованием BroadR-Reach технологии удалось почти вдвое сократить скорость передачи (до 66,6 Мбод), что позволяет использовать неэкранированную витую пару. В принципе, BroadR-Reach можно рассматривать как «легкую» версию Gigabit с двунаправленной связью при использовании только одной пары проводов. Благодаря PAM-3 сигнализации может быть достигнута передача данных с погрешностью менее 10-10 даже без внесения поправок на ошибки.
Применение в автомобиле навязывает значительно более высокие требования к электронным системам и их компонентам (по сравнению с обыкновенным потребительским применением) главным образом с точки зрения электромагнитной совместимости [ISO11452] и условий окружающей среды. Первые исследования показали, что BroadR-Reach подходит для использования в автомобиле. Однако для достижения надежности следующего поколения автомобильных сетей должны быть разработаны новые оптимизированные компоненты (рис. 6). По сравнению со стандартным Fast Ethernet, спецификации могут быть значительно снижены. Применение емкостной связи вместо обычного трансформатора, усиления на аппаратном уровне — в составе протокола физического уровня, синфазных дросселей (CMC), разделительных конденсаторов, разъемов и кабеля неэкранированной витой пары — все это очень похоже на FlexRay или CAN-связь.

Рис. 6. Диаграмма BroadR-Reach системы
Протокол физического уровня в качестве интерфейса между аналоговыми средствами передачи и цифровыми MAC-контроллерами во многом определяет надежность связи. В то время как потребительский протокол физического уровня оптимизирован для поддержки кабелей длиной более 100 м, в автомобиле, как правило, приходится иметь дело с длиной менее 10 м. Задача здесь состоит в том, чтобы найти источник импульсов и приемник, оптимизированные для таких длин кабеля, которые смогут удовлетворить строгим требованиям излучения и защищенности. На рис. 7 показан спектр сигнала передатчика NXP с оптимизированным формированием импульсов, доказывающим, что проблема излучения может быть решена без использования дорогостоящего фильтра низких частот. Для сравнения: соответствующий спектр сигнала передатчика Fast Ethernet показывает более высокий сигнал в критическом FM-диапазоне.

Рис. 7. Спектр сигналов
Технология BroadR-Reach, допускающая использование неэкранированной витой пары, делает Ethernet экономически конкурентоспособным для применения в автомобильной промышленности. FlexRay-кабель в состоянии справиться с тяжелыми условиями окружающей среды, поэтому он применим для автомобильного Ethernet. Однако, в отличие от бытовых применений, требуется тщательное изучение влияния условий окружающей среды (главным образом температуры) на целостность сигнала Ethernet. Рис. 8 иллюстрирует сравнительное моделирование глазковой индикации на 20 м кабеля FlexRay при комнатной и повышенной (+105 °C) температурах кабеля. Большая «сжатость» глазковой диаграммы при высоких температурах указывает на рост межсимвольной интерференции (ISI) в результате ограничения пропускной способности кабеля. Пока длина кабеля составляет менее 20 м, снижение отношения сигнал–шум может быть обычно скомпенсировано адаптивным выравниванием в приемнике без увеличения частоты появления ошибочных битов.

Рис. 8. Глазковая диаграмма сигнала
Выводы
- Необходимо увеличение пропускной способности для систем помощи водителю и информационно-развлекательных систем.
- Для сетевых топологий нужен переход от децентрализованных предметно-ориентированных архитектур к иерархическим системам, которые имеют в основе магистрали.
- Ethernet обеспечивает масштабируемость и гибкость для следующих поколений автомобильных сетей.
- В течение следующего десятилетия CAN и FlexRay будут применяться для обеспечения безопасности критически важных сообщений.
- Необходимы дальнейшие исследования для проверки безопасного сосуществования различных классов передачи данных в одной сети Ethernet.
- Требуются новые, оптимизированные для автомобиля, компоненты, в основном Ethernet-коммутаторы и протоколы физического уровня (первые обнадеживающие шаги были предприняты в BroadR-Reach технологии).
- OPEN Alliance и AUTOSAR возглавляют дальнейшую стандартизацию на уровнях аппаратного и программного обеспечения.
Глоссарий
CAN (Controller Area Network) — протокол промышленной сети, ориентированный на объединение контроллеров, исполнительных устройств и датчиков. Предназначен для организации высоконадежных недорогих каналов связи в распределенных системах управления. Режим передачи — последовательный, пакетный. Обеспечивает передачу данных в реальном масштабе времени, коррекцию ошибок и высокую помехоустойчивость. Скорость передачи задается программно и может быть до 1 Мбит/с. Разработан компанией Robert Bosch GmbH в 1980-х гг. и в настоящее время широко распространен в промышленной автоматике, автомобильной промышленности, технологиях «умного дома» и других областях.
LIN (Local Interconnect Network) — протокол промышленной сети, разработанный консорциумом европейских автопроизводителей и предназначенный для создания дешевых локальных сетей обмена данными на коротких расстояниях в так называемом «человеческом» временном диапазоне (порядка сотен миллисекунд). LIN-протокол утвержден Европейским Автомобильным Консорциумом как дешевое дополнение к сверхнадежному протоколу CAN. LIN и CAN дополняют друг друга: область применения CAN — участки, где требуется сверхнадежность и скорость; область применения LIN — простые узлы, работающие с малыми скоростями на коротких расстояниях (дверные замки, стеклоочистители, стеклоподъемники, магнитола, климат-контроль).
FlexRay — высокоскоростной сетевой протокол для автомобилей, разработанный консорциумом FlexRay, основанным компанией NXP совместно с BMW, DaimlerChrysler, Bosch, GM и Volkswagen (консорциум распался в 2009 г.). Пропускная способность протокола достигает 10 Мбит/с. Протокол FlexRay более скоростной и надежный, но и более дорогой, чем CAN.
Ethernet (от англ. Ether — «эфир») — пакетная технология передачи данных для локальных компьютерных сетей. Первые версии технологии разработаны на рубеже 70–80-х годов. Стандарты Ethernet определяют как проводные соединения и электрические сигналы на физическом уровне, так и форматы кадров и протоколы передачи данных на канальном уровне. Различные модификации Ethernet позволяют обеспечить передачу данных со скоростью 10 Мбит/с, 100 Мбит/с (Fast Ethernet), 1 Гбит/с (Gigabit Ethernet) и 10 Гбит/с (Ethernet 10G).
AVB или Ethernet AVB (Audio Video Bridging) — комплекс технических стандартов IEEE 802.1, разработанный альянсом AVnu Alliance для обеспечения удобной передачи медиа-потоков в рамках существующих Ethernet-протоколов.
- http://www.avnu.org
- http://www.opensig.org
- Streichert, Dr. Thilo. IP-basiert Netze für eingebettete Systems. Daimler AG. SEIS TP2 übersichtsvortrag. Munich, Germany 20.09.2011.
- Plankensteiner, Dr. Markus. Ethernet Learns to Drive Hanser Automotive. TTTech. Vienna, Austria. 12/2011.
- Eckert, Prof. Dr. C. IP-basierte Kommunikationen im/zum Fahrzeug, Fraunhofer München und Darmstadt. SafeTRANS Workshop Präsentation. 05.05.2010
 25 мая, 2020
25 мая, 2020 6 сентября, 2021
6 сентября, 2021